ADAS Radar Sensor Teardown & Should Costing
Disclaimer
This study was conducted entirely in-house by ASI Engineering to demonstrate the capabilities of the xcPEP® platform. The product was independently procured by ASI. No proprietary or confidential information from any other party has been used. Results are not updated after publishing.
Software platforms used for this study
This study is powered by ASI’s proprietary should-costing ecosystem - xcPEP and xcPROC - engineered to deliver real-world accurate, traceable should-costing across mechanical, electrical, and electronics components..
xcPEP delivers real-world accurate, transparent & defensible should cost analysis of mechanical, electrical & electronics components from drawings or physical parts.
Explore xcPEP →xcPROC is the centralized database engine powering xcPEP. Built entirely by ASI’s data research team, each database is meticulously curated to be region-specific and time-specific.
Explore xcPROC →

With the advent of advanced safety features like Adaptive Cruise Control, Emergency Brake Assist, and Forward Collision Warning, the need for Continental ARS 4-B Radar Sensor in cars is increasingly necessary.
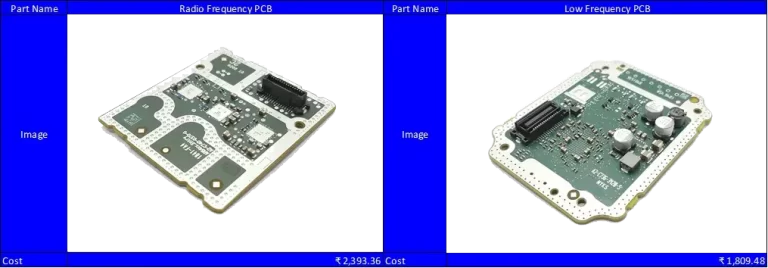
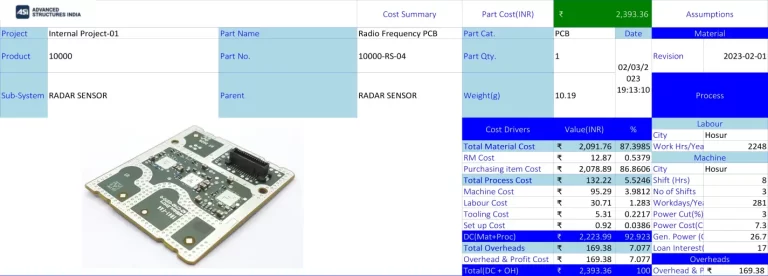
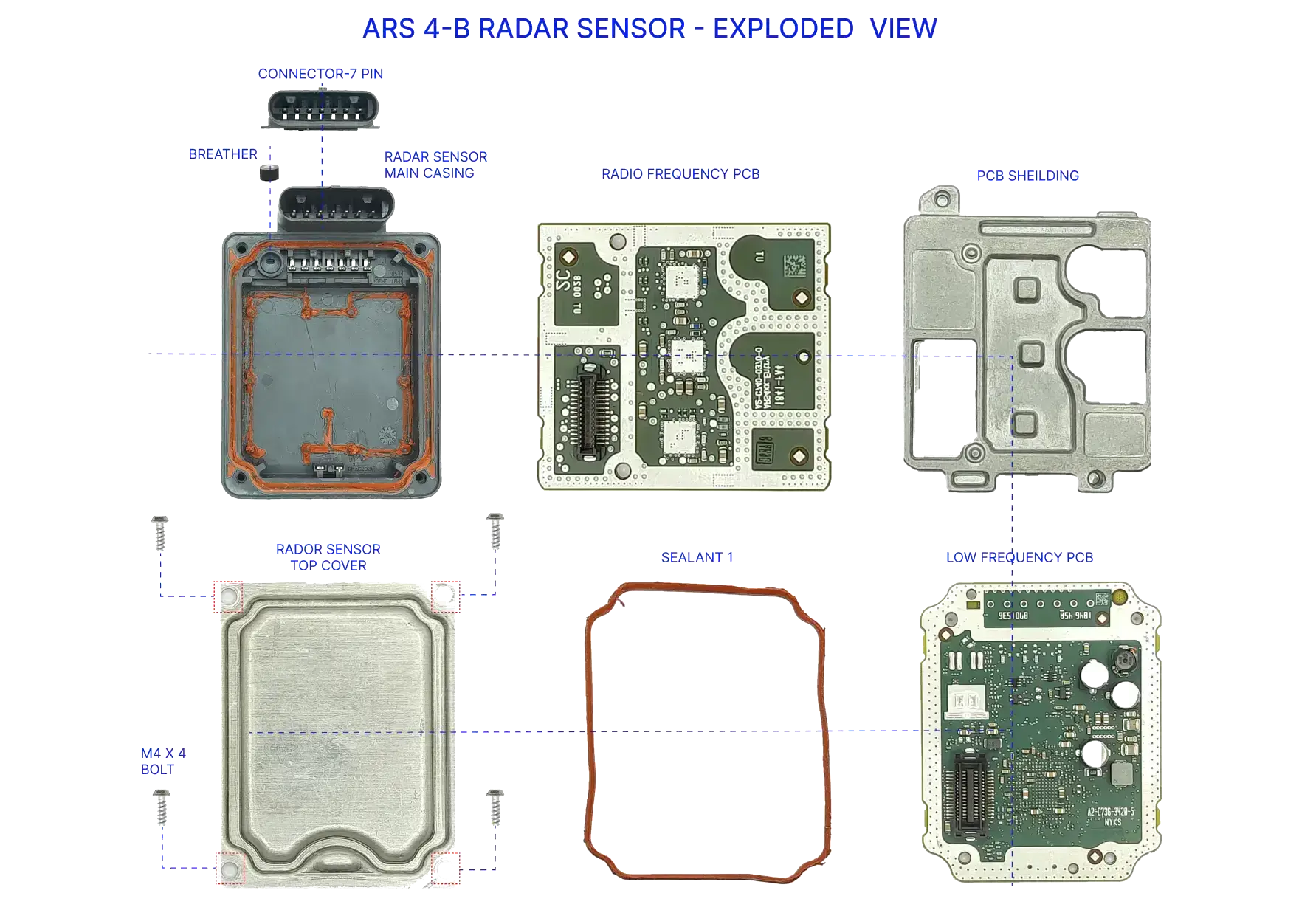
The Continental ARS 4-B radar sensor is used in a range of vehicles, including Tesla Model 3 & Mercedes Benz E Class. This sensor is mounted to the front center of the car behind the bumper, and it provides critical data to car’s safety systems or ADAS (Advanced Driver Assistance Systems). It has a field of view that covers both short and long-range scans. For short-range scans, it can cover a distance of up to 55 meters with an angle of ±45°. For far-range scans, it can cover distances of up to 120 meters with an angle of ±9° and up to 170 meters with an angle of ±4°. Additionally, the sensor has a field of view in elevation covering +18° for both far and near-range scans. Continental ARS 4-B has its Radio Frequency PCB and Low Frequency PCB separation using an aluminum shielding (see Figure 1.2). The Radio Frequency PCB contains three receiver (Rx) antennas and two transmitter (Tx) antennas (Ref. Figure 1.1). The frequency of the Continental ARS 4-B radar sensor ranges around 76-77GHz.
The Continental ARS 4-B sensor utilizes FMCW (Frequency Modulated Continuous Wave) technology with rapid ramps to measure the distance and velocity of objects without reflectors. This measurement is achieved in a single cycle, utilizing Doppler’s principle and is performed at real-time scanning rate of 15 scans per second and the data is generated after every 60ms. The sensor is also capable of measuring relative velocities between -400 and +200 km/h.
This comprehensive blog offers a thorough analysis of the Continental ARS 4-B radar sensor, covering its features, specifications, packaging construction, PCB architecture, bill of materials, and manufacturing cost.
In our teardown lab located in Bangalore, we have diligently gathered and scrutinized more than 5,000 data points concerning this radar sensor, which consists of 23 features and specifications, 9 parts, and over 70 PCB components listed in the bill of materials and Cost BOM. Every single part has been assessed based on an average of 25 parameters according to their respective categories, and a comprehensive should costing analysis has been conducted. Furthermore, we have produced 12 schematic diagrams to comprehend the sensor’s construction and architecture. We have captured over 100 images to explore the component at different teardown stages and to compile the bill of materials.
Features of 77GHz Continental ARS 4-B
1. Field of View in Azimuth & Elevation
The vehicle’s Short-Range Scan covers a distance of 55 meters and scans angles between ±45°. For Far-Range Scan, the vehicle can travel up to 120 meters while scanning angles between ±9°, and up to 170 meters while scanning angles between ±4°. Additionally, with the installation of Continental ARS 4-B, the vehicle can cover an elevation angle of +18° for both Far and Near range scans, as shown in Figure 1.3 and 1.4.


2. Object Detection:


3. Future driving path of the vehicle:

4. Adaptive cruise control and emergency brake assist
-
Adaptive Cruise Control:
The sensor detects objects within its Field of View and transmits a targeted message output to the Adaptive Cruise Control (a driver-assistance system), as shown in Figure 1.8. The following are the messages sent by the radar sensor:- A message containing a list of all objects detected within the Field of View.
- A message containing the distances to the detected objects.
- If the distance to the vehicle ahead falls below the threshold distance, a Brake Request message is sent to the Adaptive Cruise Control system.
-
Emergency Brake Assist:
Once the Radar Sensor detects objects within its Field of View, it sends a specific message output request to the Emergency Brake Assist system, as depicted in Figure 1.9. The following messages are sent by the radar sensor:- A distance warning message is transmitted when the distance to one or more detected objects falls below a predetermined threshold within the Field of View.
- If the distance to one or more objects falls below a second threshold, a deceleration request message is transmitted.
- Upon receiving these message requests, the braking system initiates deceleration to avoid a collision with the detected objects. The sensor provides the necessary deceleration information to ensure the collision is avoided when the object falls below the second threshold.

Fig No. 1.8 Adaptive Cruise Control & Emergency Brake Assist
5. Occupant Safety Support:
After detecting objects within its Field of View, the Radar Sensor sends a specific message output request to the Occupant Safety Support system.
The following messages are transmitted by the radar sensor:
- A safety belt pre-tensioning request message is sent in the event of a vehicle collision, which activates the safety belt to pull back the driver and front seat passenger to their seats before the impact occurs, as shown in Figure 1.9
- An Airbag Prefill Request message is sent in the event of a vehicle collision, which activates the airbag, as shown in Figure 1.10

6. CAN Connector
The connector for the Continental ARS 4-B Radar Sensor Controller Area Network (CAN) contains seven terminals made of copper coated with tin. Although copper is commonly used for terminals due to its good electrical conductivity and affordability, it can corrode over time and result in poor connections. To avoid this, a layer of tin is often applied to the copper terminals to provide protection against oxidation.
Tin plating offers various advantages for CAN applications, such as better resistance to corrosion, improved solderability, and increased durability. Additionally, it helps to prevent the copper from oxidising, which ensures a dependable connection. This information can be found in Figure 1.11

Architecture Diagrams
In the field of radar sensor engineering, a thorough understanding of the packaging, overall construction, and functioning of the device is essential for successful development and deployment. To achieve this understanding, an architecture study was conducted, resulting in the creation of 12 diagrams that comprehensively categorize the various aspects of the radar sensor. These diagrams include the following:
- Packaging diagram, which details the mounting of all the sensor’s parts and their key dimensions
- Positioning diagram, which explains how the sensor should be positioned onto the vehicle,
- Layout diagram, which depicts the Printed Circuit Board Assembly (PCBA) layout
- Functional diagram, which provides insight into the antenna functionality.
By utilizing these diagrams, engineers can gain a comprehensive understanding of the inner workings of the radar sensor, allowing for effective design, testing, and deployment.
Packaging Diagram



Positioning
The positioning diagram depicts the mounting location of the Continental ARS 4-B radar sensor relative to the road surface level. The sensor is mounted in a vertical orientation at a height ranging from 295mm to 800mm above the road surface level. It is situated in front of the vehicle and behind the bumper, as shown in Figure 1.13. Additionally, the sensor is mounted at a 0° angle relative to the driving direction of the vehicle.

Fig No. 1.13 Illustration of the mounting position of the ARS 4-B
Layout Diagrams

Fig No. 1.14 Low frequency PCB top layout



Functionality Diagram (Antenna)
The Continental ARS 4-B sensor utilizes a series-fed microstrip patch antenna, with two transmitter (TX) and three receiver (RX) antennas printed on a PTFE (Teflon) substrate that is 100µm thick in the RF printed circuit board (PCB). By employing multiple-input multiple-output (MIMO) concepts and increasing the number of Tx and Rx antennas, higher angle resolution can be achieved, as shown in Figure 1.18. The conducted power, which is the RF power supplied by the RFID system to the antenna, is less than 10 dBm (10mW).
To enhance the bandwidth of the antenna, the thickness of the PTFE substrate is kept at 100 microns. Additionally, a resistive sheet is printed on top of the substrate and a metallic plane with via fences are used to mitigate surface waves. Dielectric loss occurs when an alternating electric field is applied, causing material molecules to undergo repeated polarization cycles and dissipate heat energy. The different types of losses in an antenna include dielectric loss, conductor loss, and surface loss, which can be reduced by selecting appropriate materials for substrate and conductors during the manufacturing process.
The accompanying diagram depicts the antenna layout on the PCB, including reflection mitigating hexagonal defected ground structure & overall grounding pattern. Further details regarding all components are provided one by one.

Receiver
Transmitter


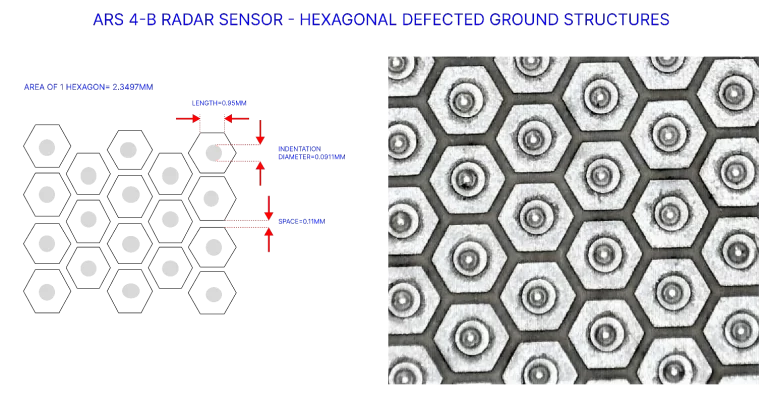
Hexagonal Ground Structures
The patch antenna is equipped with hexagonal defected structures and vias to minimise reflection (refer to Figure 1.22). These structures are incorporated to enhance the impedance matching between the antenna and the transmission line or feed network, thereby reducing reflection. Additionally, the hexagonal structures impact the operating bandwidth and effectively reduce the substrate’s dielectric constant.
The Hexagonal defected ground structures play a crucial role in distributing the current in the ground plane and regulating input impedance and excitation of radio waves in the substrate. This ensures a more uniform current distribution and leads to better radiation properties.
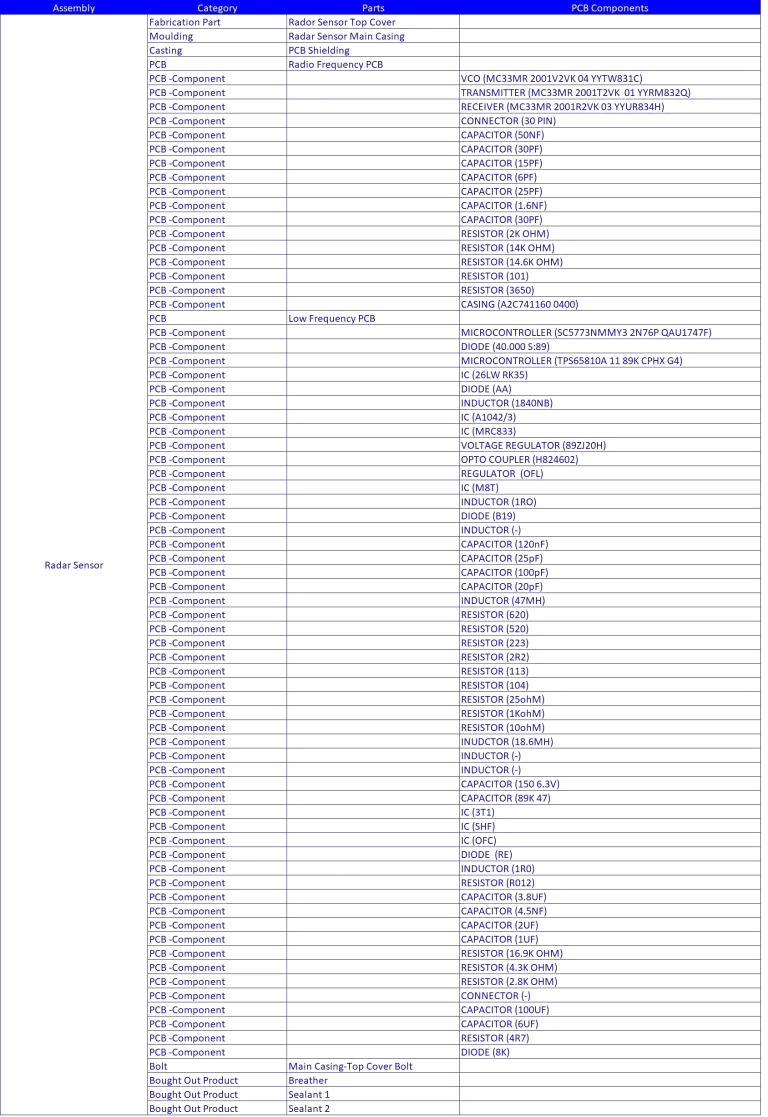
Bill of Material Study
Our team has performed a comprehensive last-level teardown analysis of the Continental ARS 4-B Radar Sensor. Through a bill of materials (BOM) study, we have systematically documented data pertaining to the various part attributes and analyzed this information to gain a detailed understanding of the device.
To provide further insight, we have compiled a detailed table that outlines the child components of the Continental ARS 4-B Radar Sensor. Each part or component has been thoroughly evaluated and an average of 18 parameters have been mapped per item, depending on the complexity category of the part.
Please refer to the table below for the BOM structure of the Continental ARS 4-B Radar Sensor and its associated child components.
Detailed Raw Material Analysis for substrate & antenna
Substrate
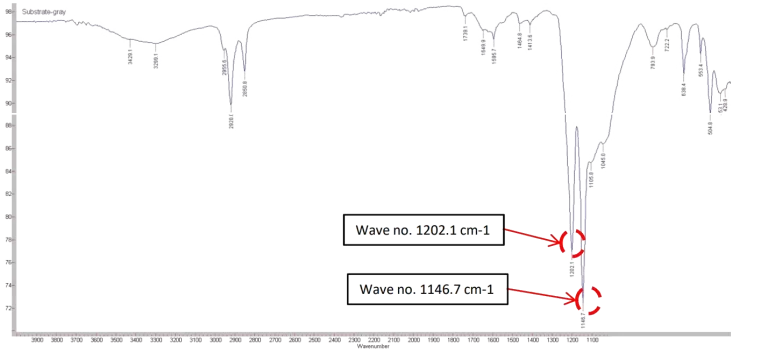
The evaluation of antenna substrate materials was performed utilizing cutting-edge testing equipment in laboratory settings. Specifically, the Agilent Technologies Cary 660ATR Diamond, along with the Resolutions Pro FTIR software, was employed for this purpose. The testing range of this apparatus spans from 4000 to 400 cm-1 and is specifically geared towards transmittance measurements. Subsequently, the material underwent DSC analysis, where its melting point was identified at 317.5 deg. C. Through the amalgamation of these two methods, it was concluded that the substrate material in question is, in fact, PTFE (Polytetrafluoroethylene) which is having a dielectric constant of 2.1 and relative permittivity of 2.05±0.01 tanδ2.7±0.02×10-4 around 84 GHZ
Micro strip antenna

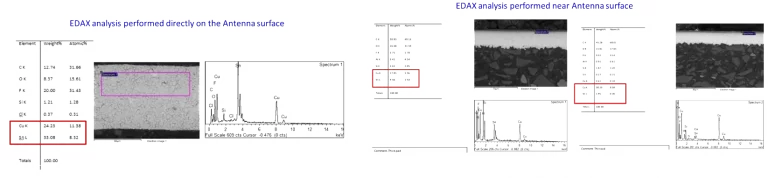
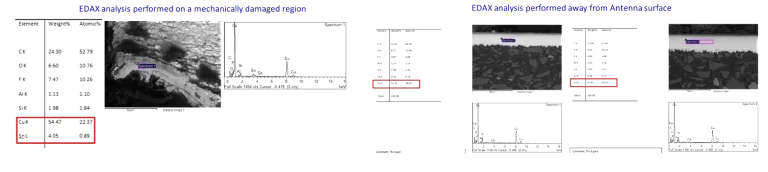
Fig No 1.24 SEM and EDAX analysis on Antenna
Weight Distribution Analysis
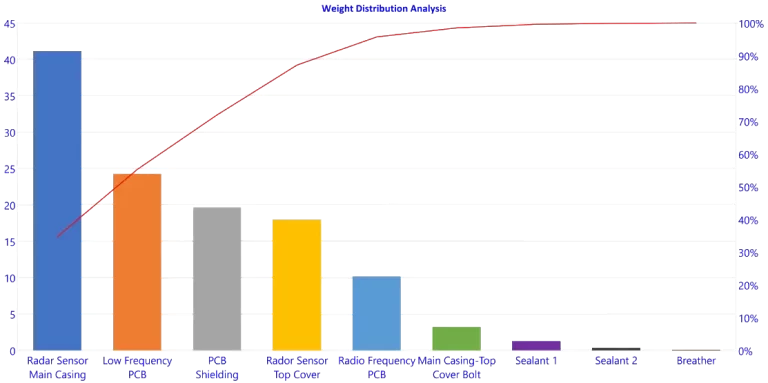
Fig No 1.25 Weight distribution Analysis
The sensor’s main casing weighs 41.15 grams, which accounts for 34.63% of the total weight of the device. This is followed by the Low Frequency PCB, which accounts for 20.45% of the total weight of the Continental ARS 4-B Radar Sensor. The aluminum PCB shielding in between these two components weighs 16.57% of the total weight of the device. Additionally, the aluminum top cover, weighing 18.01 grams, makes a significant contribution to the device’s weight. These four items account for 90% of the total weight of the device.
Manufacturing Category Distribution Analysis

Fig No 1.26 – Manufacturing Category Analysis
Raw Material Distribution Analysis

Fig No 1.27 Raw material distribution analysis
Should Costing of Continental ARS 4-B Radar Sensor
A comprehensive should costing analysis was conducted for the Continental ARS 4-B radar sensor, resulting in the following findings. The manufacturing cost of the radar sensor is 4,486 INR, taking into account the following factors as assumptions:
- The Continental ARS 4-B sensor is produced in Chennai, Tamil Nadu.
- The study considered an annual volume of 240,000 units.
- The latest material rates, labor hourly rates, and machine hour rates were used for the calculations, taken as of Jan’23.
- PCB Child parts are considered as bought out in bulk from spot buy sites like Digikey.
- Indian Rupees (INR) currency is used for costing.
Outcome


Fig No 1.29 – Cost Pareto Analysis